Deep Q Network
In this notebook, we are going to implement a simplified version of Deep Q-Network and attempt to solve lunar lander environment. The environment is considered solved if our agent is able to achieve the score above 200.

Imports
import random
import sys
from time import time
from collections import deque, defaultdict, namedtuple
import numpy as np
import pandas as pd
import gym
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import matplotlib.pyplot as plt
%matplotlib inline
#plt.style.use('seaborn')
plt.style.use('fivethirtyeight')
Gym Environment
Create gym environment, explore its state and and action space, play with random agent
env = gym.make('LunarLander-v2')
env.seed(0)
## inspect action space and state space
print(env.action_space)
print(env.observation_space)
Discrete(4)
Box(8,)
From Gym Docs: The Discrete space allows a fixed range of non-negative numbers, so in this case valid actions are either 0 or 1. The Box space represents an n-dimensional box, so valid observations will be an array of 4 numbers. see more
## Agent that takes random actions
max_episodes = 100
scores = []
actions = range(env.action_space.n)
for i in range(1, max_episodes+1):
state = env.reset()
score = 0
while True:
action = np.random.choice(actions)
state, reward, done, info = env.step(action)
score += reward
if done:
if i % 20 == 0:
print('Episode {}, score: {}'.format(i, score))
break
scores.append(score)
Episode 20, score: -190.99687644625675
Episode 40, score: -176.00163549381244
Episode 60, score: -178.45172368491774
Episode 80, score: -209.74375316417178
Episode 100, score: -81.62829086848953
## Show random agent's performance
plt.figure(figsize=(8,6))
plt.plot(range(max_episodes), scores)
plt.title('Performance of Random Agent')
plt.xlabel('Episodes')
plt.ylabel('Score')
plt.show()
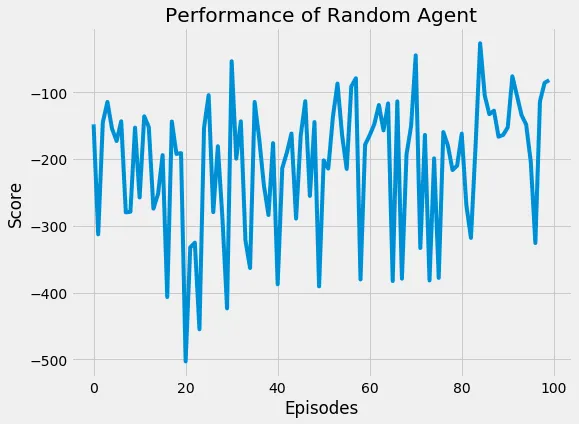
## Average score
print('Average score of random agent over {} episodes: {:.2f}'.format(max_episodes, np.mean(scores)))
Average score of random agent over 100 episodes: -205.29
Deep Q Network (DQN)
its time to implement the ideas from the seminal DQN paper by Mnih et al. The paper presented a new approach that allowed the agent to master diverse range of Atari games only with raw pixels and score as inputs.
This was the paper that largely got me interested in Deep learning and Reinforcement learning, at that time I had only started working by way through machine learning coursework (EDX Analytics Edge and Coursera Machine Learning specialisation).
Approach
They use a Neural network (Convolutional Neural Network) as non-linear function approximator to represent the action-values (Q). But Neural networks are known to be unstable when represented as action-value function. This is due to correlation between subsequent states, correlation between action-values and target values and a small updates to Q significantly changing the policy.
Their approach overcomes these instabilities using two key ideas:
1. EXPERIENCE REPLAY
They use a fixed memory buffer to record experiences and use it to train the Q network by sampling the experiences uniformly at random.
2. FIXED Q TARGET NETWORK
They use a separate (fixed) network to represent the target values, the fixed network weights are updated by Q network weights at a fixed step C and are kept fixed in between
Just show me the algorithm, alright here you go (screenshot from DQN paper) :

In this notebook, we will use a fully connected neural network (instead of CNN presented in the paper). The CNN version will be implemented in the future notebook.
We break down our implementation into following components, all of these will ideally be in python files (.py) but since we are using notebooks I have added here to show the entire implementation.
- DQNAgent
- QNetwork
- ReplayMemory
## Use cuda if available else use cpu
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
Q Network
Fully connected neural network (Q Network) implemetation in awesome pytorch
class QNetwork(nn.Module):
def __init__(self, state_size, action_size, seed):
"""
Build a fully connected neural network
Parameters
----------
state_size (int): State dimension
action_size (int): Action dimension
seed (int): random seed
"""
super(QNetwork, self).__init__()
self.seed = torch.manual_seed(seed)
self.fc1 = nn.Linear(state_size, 32)
self.fc2 = nn.Linear(32, 64)
self.fc3 = nn.Linear(64, action_size)
def forward(self, x):
"""Forward pass"""
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
Replay Buffer
class ReplayBuffer:
def __init__(self, buffer_size, batch_size, seed):
"""
Replay memory allow agent to record experiences and learn from them
Parametes
---------
buffer_size (int): maximum size of internal memory
batch_size (int): sample size from experience
seed (int): random seed
"""
self.batch_size = batch_size
self.seed = random.seed(seed)
self.memory = deque(maxlen=buffer_size)
self.experience = namedtuple("Experience", field_names=["state", "action", "reward", "next_state", "done"])
def add(self, state, action, reward, next_state, done):
"""Add experience"""
experience = self.experience(state, action, reward, next_state, done)
self.memory.append(experience)
def sample(self):
"""
Sample randomly and return (state, action, reward, next_state, done) tuple as torch tensors
"""
experiences = random.sample(self.memory, k=self.batch_size)
# Convert to torch tensors
states = torch.from_numpy(np.vstack([experience.state for experience in experiences if experience is not None])).float().to(device)
actions = torch.from_numpy(np.vstack([experience.action for experience in experiences if experience is not None])).long().to(device)
rewards = torch.from_numpy(np.vstack([experience.reward for experience in experiences if experience is not None])).float().to(device)
next_states = torch.from_numpy(np.vstack([experience.next_state for experience in experiences if experience is not None])).float().to(device)
# Convert done from boolean to int
dones = torch.from_numpy(np.vstack([experience.done for experience in experiences if experience is not None]).astype(np.uint8)).float().to(device)
return (states, actions, rewards, next_states, dones)
def __len__(self):
return len(self.memory)
Agent
BUFFER_SIZE = int(1e5) # Replay memory size
BATCH_SIZE = 64 # Number of experiences to sample from memory
GAMMA = 0.99 # Discount factor
TAU = 1e-3 # Soft update parameter for updating fixed q network
LR = 1e-4 # Q Network learning rate
UPDATE_EVERY = 4 # How often to update Q network
class DQNAgent:
def __init__(self, state_size, action_size, seed):
"""
DQN Agent interacts with the environment,
stores the experience and learns from it
Parameters
----------
state_size (int): Dimension of state
action_size (int): Dimension of action
seed (int): random seed
"""
self.state_size = state_size
self.action_size = action_size
self.seed = random.seed(seed)
# Initialize Q and Fixed Q networks
self.q_network = QNetwork(state_size, action_size, seed).to(device)
self.fixed_network = QNetwork(state_size, action_size, seed).to(device)
self.optimizer = optim.Adam(self.q_network.parameters())
# Initiliase memory
self.memory = ReplayBuffer(BUFFER_SIZE, BATCH_SIZE, seed)
self.timestep = 0
def step(self, state, action, reward, next_state, done):
"""
Update Agent's knowledge
Parameters
----------
state (array_like): Current state of environment
action (int): Action taken in current state
reward (float): Reward received after taking action
next_state (array_like): Next state returned by the environment after taking action
done (bool): whether the episode ended after taking action
"""
self.memory.add(state, action, reward, next_state, done)
self.timestep += 1
if self.timestep % UPDATE_EVERY == 0:
if len(self.memory) > BATCH_SIZE:
sampled_experiences = self.memory.sample()
self.learn(sampled_experiences)
def learn(self, experiences):
"""
Learn from experience by training the q_network
Parameters
----------
experiences (array_like): List of experiences sampled from agent's memory
"""
states, actions, rewards, next_states, dones = experiences
# Get the action with max Q value
action_values = self.fixed_network(next_states).detach()
# Notes
# tensor.max(1)[0] returns the values, tensor.max(1)[1] will return indices
# unsqueeze operation --> np.reshape
# Here, we make it from torch.Size([64]) -> torch.Size([64, 1])
max_action_values = action_values.max(1)[0].unsqueeze(1)
# If done just use reward, else update Q_target with discounted action values
Q_target = rewards + (GAMMA * max_action_values * (1 - dones))
Q_expected = self.q_network(states).gather(1, actions)
# Calculate loss
loss = F.mse_loss(Q_expected, Q_target)
self.optimizer.zero_grad()
# backward pass
loss.backward()
# update weights
self.optimizer.step()
# Update fixed weights
self.update_fixed_network(self.q_network, self.fixed_network)
def update_fixed_network(self, q_network, fixed_network):
"""
Update fixed network by copying weights from Q network using TAU param
Parameters
----------
q_network (PyTorch model): Q network
fixed_network (PyTorch model): Fixed target network
"""
for source_parameters, target_parameters in zip(q_network.parameters(), fixed_network.parameters()):
target_parameters.data.copy_(TAU * source_parameters.data + (1.0 - TAU) * target_parameters.data)
def act(self, state, eps=0.0):
"""
Choose the action
Parameters
----------
state (array_like): current state of environment
eps (float): epsilon for epsilon-greedy action selection
"""
rnd = random.random()
if rnd < eps:
return np.random.randint(self.action_size)
else:
state = torch.from_numpy(state).float().unsqueeze(0).to(device)
# set the network into evaluation mode
self.q_network.eval()
with torch.no_grad():
action_values = self.q_network(state)
# Back to training mode
self.q_network.train()
action = np.argmax(action_values.cpu().data.numpy())
return action
def checkpoint(self, filename):
torch.save(self.q_network.state_dict(), filename)
Train
With all the components in place, finally we can begin training out agent.
## Copying the hyperparameters again here, for reference
BUFFER_SIZE = int(1e5) # Replay memory size
BATCH_SIZE = 64 # Number of experiences to sample from memory
GAMMA = 0.99 # Discount factor
TAU = 1e-3 # Soft update parameter for updating fixed q network
LR = 1e-4 # Q Network learning rate
UPDATE_EVERY = 4 # How often to update Q network
MAX_EPISODES = 2000 # Max number of episodes to play
MAX_STEPS = 1000 # Max steps allowed in a single episode/play
ENV_SOLVED = 200 # MAX score at which we consider environment to be solved
PRINT_EVERY = 100 # How often to print the progress
## Epsilon schedule
EPS_START = 1.0 # Default/starting value of eps
EPS_DECAY = 0.999 # Epsilon decay rate
EPS_MIN = 0.01 # Minimum epsilon
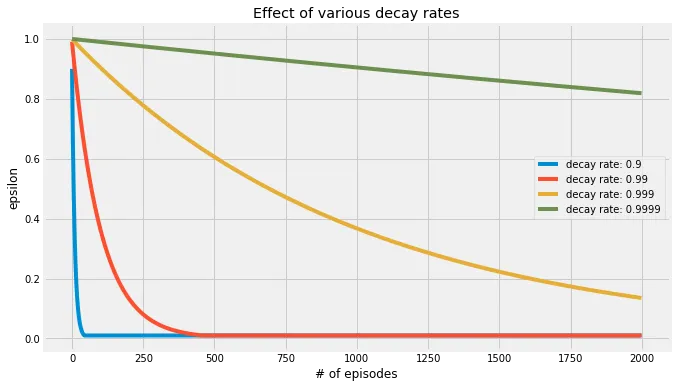
Visualise Epsilon Decay
Before we begin, lets visualise the effect of epsilon decay on epsilon
EPS_DECAY_RATES = [0.9, 0.99, 0.999, 0.9999]
plt.figure(figsize=(10,6))
for decay_rate in EPS_DECAY_RATES:
test_eps = EPS_START
eps_list = []
for _ in range(MAX_EPISODES):
test_eps = max(test_eps * decay_rate, EPS_MIN)
eps_list.append(test_eps)
plt.plot(eps_list, label='decay rate: {}'.format(decay_rate))
plt.title('Effect of various decay rates')
plt.legend(loc='best')
plt.xlabel('# of episodes')
plt.ylabel('epsilon')
plt.show()
You can play with the learning rate decay in this interactive notebook
## Get state and action sizes
state_size = env.observation_space.shape[0]
action_size = env.action_space.n
print('State size: {}, action size: {}'.format(state_size, action_size))
State size: 8, action size: 4
dqn_agent = DQNAgent(state_size, action_size, seed=0)
start = time()
scores = []
## Maintain a list of last 100 scores
scores_window = deque(maxlen=100)
eps = EPS_START
for episode in range(1, MAX_EPISODES + 1):
state = env.reset()
score = 0
for t in range(MAX_STEPS):
action = dqn_agent.act(state, eps)
next_state, reward, done, info = env.step(action)
dqn_agent.step(state, action, reward, next_state, done)
state = next_state
score += reward
if done:
break
eps = max(eps * EPS_DECAY, EPS_MIN)
if episode % PRINT_EVERY == 0:
mean_score = np.mean(scores_window)
print('\r Progress {}/{}, average score:{:.2f}'.format(episode, MAX_EPISODES, mean_score), end="")
if score >= ENV_SOLVED:
mean_score = np.mean(scores_window)
print('\rEnvironment solved in {} episodes, average score: {:.2f}'.format(episode, mean_score), end="")
sys.stdout.flush()
dqn_agent.checkpoint('solved_200.pth')
break
scores_window.append(score)
scores.append(score)
end = time()
print('Took {} seconds'.format(end - start))
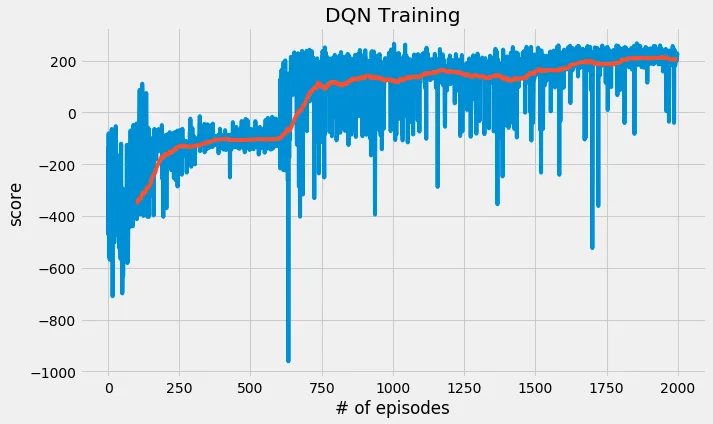
Progress 2000/2000, average score:205.24
dqn_agent.checkpoint('solved_200.pth')
Plot
plt.figure(figsize=(10,6))
plt.plot(scores)
## A bit hard to see the above plot, so lets smooth it (red)
plt.plot(pd.Series(scores).rolling(100).mean())
plt.title('DQN Training')
plt.xlabel('# of episodes')
plt.ylabel('score')
plt.show()
Play
dqn_agent.q_network.load_state_dict(torch.load('solved_200.pth'))
## Uncomment if you wish to save the video
## from gym import wrappers
## if env:
## env.close()
## env = gym.make('LunarLander-v2')
## env.seed(0)
## env = wrappers.Monitor(env, '/tmp/lunar-lander-6', video_callable=lambda episode_id: True)
for i in range(5):
score = 0
state = env.reset()
while True:
action = dqn_agent.act(state)
next_state, reward, done, info = env.step(action)
state = next_state
score += reward
if done:
break
print('episode: {} scored {}'.format(i, score))
episode: 0 scored 96.34675361225015
episode: 1 scored 242.1703137637504
episode: 2 scored -60.15327720727131
episode: 3 scored -84.00348430586148
episode: 4 scored 201.80322423760225
env.close()
Click on the movie(s) below to see how our agent performed. I am only showing the ones where the agent performed well or failed in a funny way.
This one is hilarious, the agent nearly lands on the pad and skids. Then, attempts to recover but fails in the end.
You can play with the learning rate decay in this interactive notebook
I used the same algorithm to solve Banana environment.

REFERENCES
[1] DQN Paper [link]
[2] Code to solve Unity Banana environment [link]
[3] Deep Reinforcement Learning [link]